Project description
Campus FreeCity
MOBILITY PLATFORM
Description
Planning, development and operation of a mobility platform with integrated control system to control a networked fleet of modular robotic vehicles (see also Campus FreeCity – project website).
Solution approach
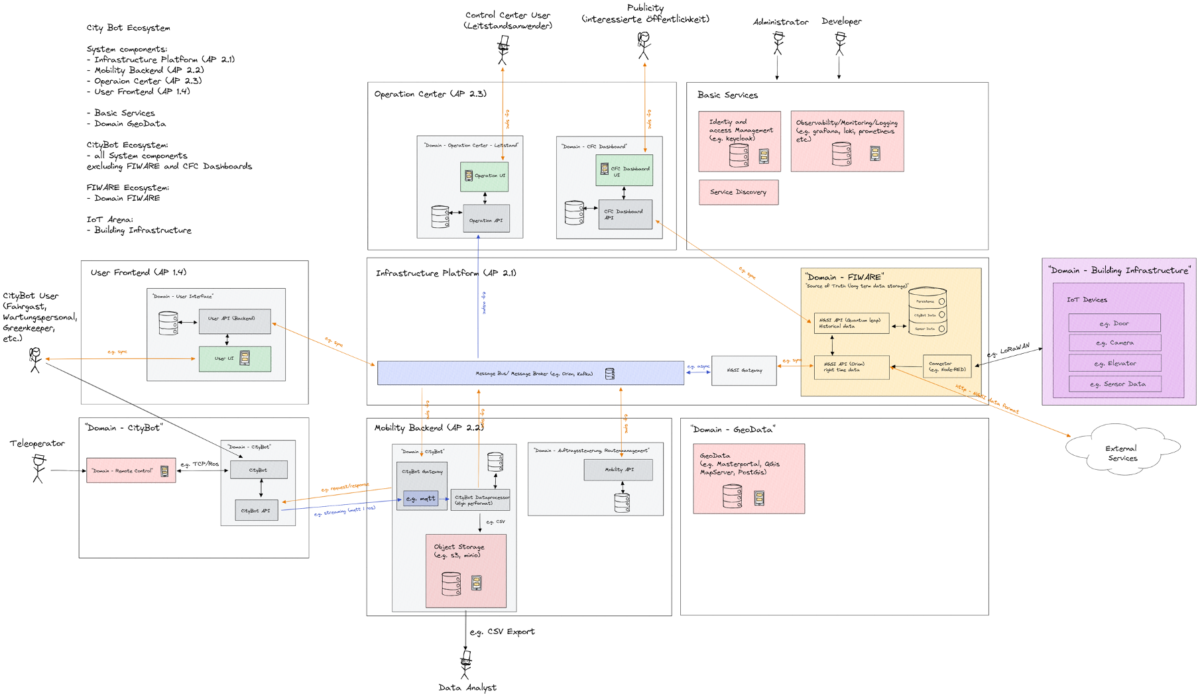
A (mobility) platform with integrated control system is developed for the networking of vehicles, operation center and sensors, as well as the connection of a vines order and billing system. This consists of the functional blocks infrastructure platform, mobility backend and operation center. The infrastructure platform realizes the digital twin of the parking area and collects data from IoT devices and CityBots, thus creating the structure for overarching data flows. The open source solution FIWARE forms the foundation to enable the standardized and efficient networking of the IoT devices with each other. The mobility backend is connected to the infrastructure platform and uses state-of-the-art AI to determine the optimal routes and driving jobs for the EDAG CityBots. A dashboard is being developed for the Operation Center, which can be used to monitor and evaluate the activities of the CityBots. In the event of incidents, operations can be supported via teleoperations and safe order fulfillment by the CityBots can be ensured. A Maintenance Area will be established for the maintenance and coupling of the CityBot train and utility modules.
Technical focus
- MicroService architecture
- Artificial intelligence for the optimization of routes and travel paths
- Digital twin of the Arenal and the Citybots
- Big Data and Data Analytics
- FIWARE standards for integration with municipalities
User-centric dashboards


Smart Infrastructure – WHO TO CONTACT

Karina Schäfer
Business Development & Sales
EDAG Group
THIS MIGHT ALSO INTEREST YOU

trive.park
Project description TRIVE.PARK DEVELOPMENT AND OPERATION OF A SMART PARKING [...]
Youth taxi app
Project description ON DEMAND YOUTH TAXI APP CONCEPTION AND DESIGN [...]

EDAG Citybot AI prototype
Project description EDAG CITYBOT KI PROTOTYPE A MULTIFUNCTIONAL, FULLY AUTONOMOUS, [...]
